

La fiabilidad es de suma importancia para las cámaras de monitoreo de tráfico. Puede sonar como un cliché, pero basta con un vehículo no registrado para que la tasa de éxito de tu proyecto de monitoreo de tráfico se vea inmediatamente comprometida debido a la pérdida de ingresos y reputación. Los fabricantes de cámaras de reconocimiento automático de matrículas (ANPR) como Adaptive Recognition son muy conscientes de eso. Continuamente desarrollan nuevos disparadores para las cámaras. Así que en el momento en que un automóvil o una placa de matrícula pasa, las cámaras pueden crear imágenes que el software ANPR puede leer fácilmente.
Estos métodos incluyen opciones de eficacia comprobada, como el disparador láser, el clásico radar o los bucles inductivos tradicionales. Los disparadores basados en hardware se siguen considerando los más fiables, ya que son menos propensos a fallos. Sin embargo, esto no significa que no existan otros métodos para capturar vehículos. Los disparadores de software se están generalizando en las cámaras ANPR por diversas razones.
Un amigo de los integradores y la carretera
La creciente popularidad de los disparadores de software radica en el hecho de que todos son no intrusivos. ¿Qué significa eso en la práctica? Tomemos como ejemplo el bucle de inducción.
Al igual que el disparador láser, el bucle de inducción está basado en hardware, proporcionando el nivel de precisión requerido. Además, la tecnología en sí es sencilla ya que el disparo se basa en el contacto físico: el automóvil toca los sensores construidos debajo de la superficie de la carretera. Sin embargo, estar ubicado debajo de la carretera también es la mayor desventaja del bucle de inducción. La única forma de tener los sensores en su posición es un proceso agotador. Requiere el cierre del carril, el corte de la carretera, a menudo hasta sus cimientos, y, después de instalar los sensores necesarios, reconstruir el asfalto/concreto para que el flujo de tráfico pueda volver a la normalidad. Y no importa qué tan rápido trabajen los instaladores, los carriles cerrados equivalen a atascos de tráfico, conductores enojados y una factura que ningún operador de carretera quiere ver.
El disparador de software le permite evitar este tipo de conmoción ya que la zona de detección solo existe en forma virtual. Concedamos que estos disparadores pueden no ser tan efectivos como sus contrapartes basadas en hardware, debido a la falta de contacto físico, pero gracias al avance en la tecnología del software, algunos disparadores no intrusivos ya están a la par con el láser y el bucle de inducción en eficiencia de detección. Incluso disparadores de software más simples pueden ser suficientes en ciertas situaciones, brindando a los propietarios de proyectos viales muchas opciones.
5 Tipos de Disparadores de Software
Detección de Línea
La detección de línea no solo es la madre de todos los disparadores basados en software, sino que también es la más sencilla. Todo lo que los operadores de la cámara tienen que hacer es dibujar una línea virtual en la interfaz gráfica a través de la carretera que desean monitorear. Si un vehículo cruza la línea, el disparador instruye a la cámara ANPR a tomar la foto.
Aunque más fácil de configurar, la detección de línea desafortunadamente no es tan efectiva como sus contrapartes más avanzadas. Dado que la zona de detección es relativamente pequeña, existe la posibilidad de que los automóviles pasen sin activar la cámara. Esto es especialmente problemático si viajan demasiado rápido o llegan a la zona junto a otro vehículo que activa la cámara un milisegundo antes. Por estas razones, la detección de línea está descartada para la activación en múltiples carriles, incluso si parece ser una opción obvia.
Detección de Movimiento
Otro disparador de software basado en un concepto relativamente simple es la detección de movimiento, que se centra en los cambios en el entorno de un objeto. En la práctica, esto significa que la cámara permanece en modo de espera si no detecta ningún movimiento relacionado con el carril que está monitoreando. En el momento en que un vehículo entra en el marco, el entorno cambia, lo que la cámara interpreta como cambio y, por lo tanto, se activa para tomar la imagen requerida.
A diferencia de la detección de líneas, el método de detección de movimiento ofrece mejores resultados, pero solo en condiciones ideales. En el momento en que algo obstruye los sensores de la cámara de monitoreo de tráfico, por ejemplo, oscuridad, lluvia intensa o niebla, depender únicamente de la detección de movimiento se convierte en un riesgo considerable. Por lo tanto, es mejor complementarlo o reemplazarlo por completo con otro método de activación para garantizar imágenes compatibles con ANPR. De lo contrario, la cámara elimina automáticamente las imágenes porque no las registra como eventos.
Seguimiento de Objetos
El seguimiento de objetos es uno de los mejores disparadores basados en software, ya que no depende de una zona virtual preestablecida ni de la búsqueda constante de cambios en el entorno de la cámara. Esta solución es, sin duda, más avanzada que los métodos de disparo por software descritos anteriormente. Aun así, requiere especial atención por parte de los integradores al configurar el sistema ANPR.
Para obtener los mejores resultados, la cámara de monitoreo de tráfico y el software que la respalda deben determinar si hay un objeto en la imagen y reconocerlo como un vehículo antes de enviar la imagen capturada al motor ANPR para su posterior procesamiento. Cabe destacar que, incluso con las mejores configuraciones, existe el riesgo de que las cámaras no detecten vehículos pequeños, como motocicletas. Sin embargo, esto es algo que la cámara y su software ANPR pueden evitar si los instaladores les enseñan a manejar estas situaciones. Una vez hecho esto, la cámara y el software ya no pueden tomar fotos correctamente; solo cuando aparecen vehículos en la imagen.
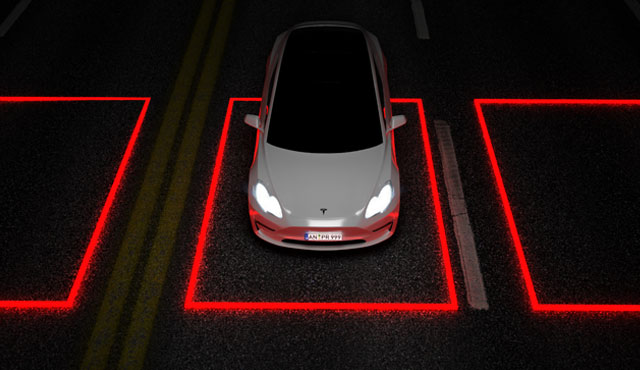
Bucle Virtual
El bucle virtual es como Kevin Flynn de la película de culto Tron: una versión completamente digitalizada del buen y antiguo bucle de inducción. Como tal, combina perfectamente los beneficios del bucle de inducción; activación instantánea y precisa y la conveniencia de no romper la superficie de la carretera. De hecho, debido a que no tienen limitaciones físicas impuestas por sensores, los integradores son libres de decidir qué tan grande será la zona de activación. Con una zona correctamente configurada, se garantizan imágenes perfectas para el ANPR.
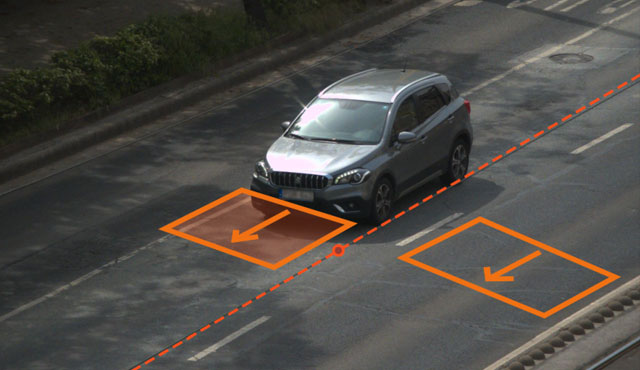
Un pequeño recordatorio: a pesar de su naturaleza no intrusiva, seguimos hablando de un bucle de inducción sin manifestación física. Por lo tanto, es mejor configurar el bucle virtual de manera similar a un bucle de inducción real. Enfócate en un solo carril y dibuja digitalmente una zona de activación lo suficientemente grande como para activar la cámara cuando un vehículo pase por ella.
Plate Finder
Desarrollado por Adaptive Recognition, Plate Finder es una ingeniosa combinación de detección de objetos virtual e inteligente. Una vez que un vehículo entra en el campo de visión de la cámara de matrículas, el software de la cámara LPR Vidar busca su matrícula. Si detecta una matrícula, la cámara detecta la presencia de un vehículo. Luego, captura la imagen para su procesamiento ANPR.
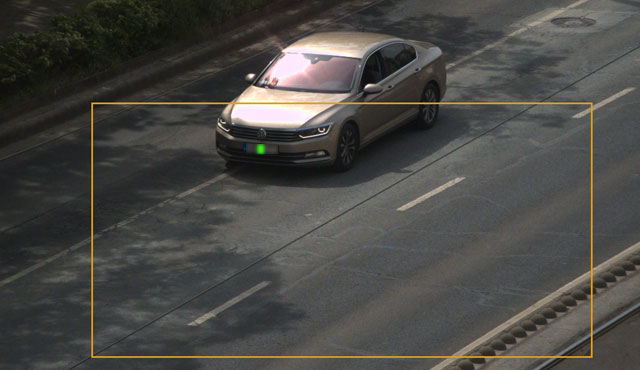
En el caso de Vidar, nuestra cámara de monitoreo de tráfico más potente hasta la fecha, el procesamiento ANPR se realiza a bordo. En cuanto Plate Finder captura la imagen, la cámara extrae los códigos de tráfico necesarios. Para ser más precisos, se trata de los caracteres de la matrícula.
¿Tiene alguna pregunta o consulta? Estamos aquí para ayudarle en cada paso del proceso, incluso proporcionándole un software LPR gratuito descargable para realizar pruebas.